



1.下载Matlab(Linux版),这里选择matlab r2016b(下载的文件包括Matlab 2016b Linux64 Crack.rar,R2016b_glnxa64_dvd1.iso,R2016b_glnxa64_dvd2.iso,第一个是破解文件),在安装前,把所需文件都拷贝到了根目录
Matlab(Linux版)下载链接:
https://www.baidupcs.com/rest/2.0/pcs/file?method=batchdownload&app_id=250528&zipcontent=%7B%22fs_id%22%3A%5B1082133615706008%5D%7D&sign=DCb740ccc5511e5e8fedcff06b081203:jd9c5Egd8cB0v75o0C9iNzuxjXw%3D&uid=1773288163&time=1512397039&dp-logid=7814327662244826864&dp-callid=0&vuk=1773288163&zipname=%E3%80%90%E6%96%87%E4%BB%B6%E5%A4%B9%E3%80%91Linux.zip
2.挂载映像文件
打开终端,使用下列命令挂先行载R2016b_glnxa64_dvd1.iso:
mkdir Matlab2016b
sudo mount -t auto -o loop R2016b_glnxa64_dvd1.iso Matlab2016b/

3.安装Matlab
①挂载iso之后,会发现文件系统多了一个盘,说明挂载成功,然后进行安装:
cd Matlab2016b/
sudo ./install


②出现“无法从DVD目录内部运行安装程序,请更改为您的主目录,然后执行以下命令:
/home/gjxs/Matlab2016b/install
然后复制粘贴/home/gjxs/Matlab2016b/install到新开的终端,运行就进入安装界面
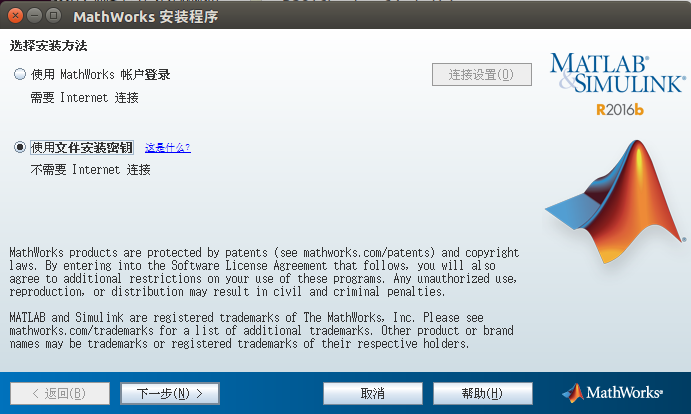
4.安装各个步骤的截图:
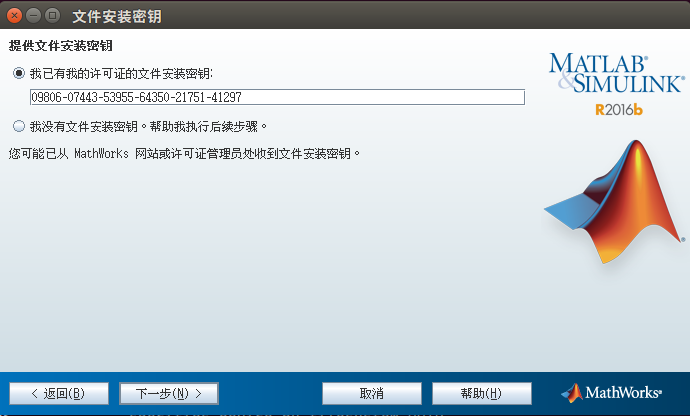
文件安装密钥:
09806-07443-53955-64350-21751-41297
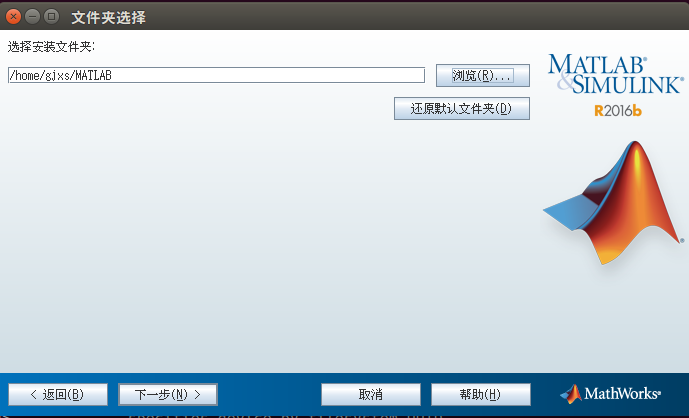
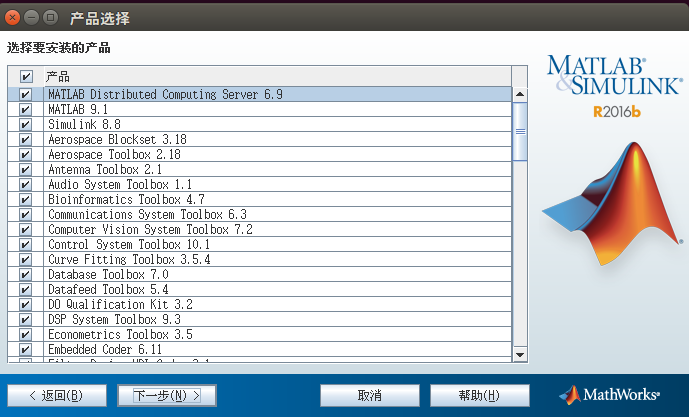
这里安装路径自己决定(我在根目录新建一个MATLAB作为安装文件夹),默认全选,点击下一步
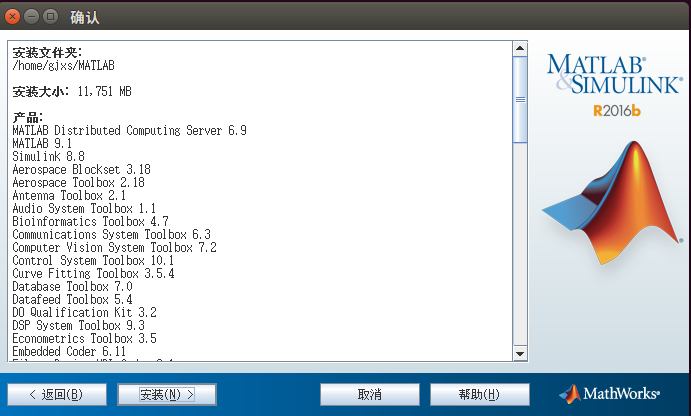 点击安装
点击安装 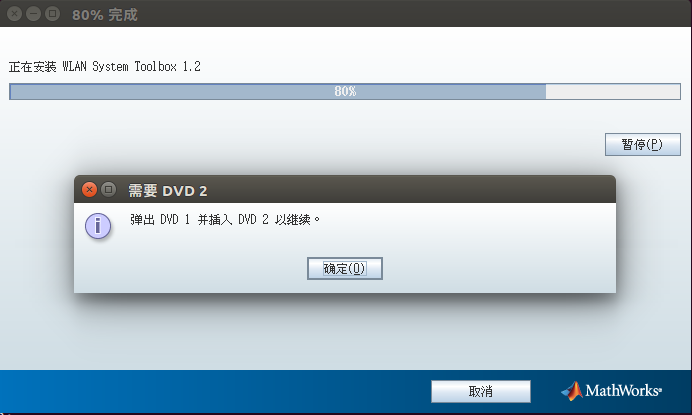
安装进行到80%的时候,会弹出一个提示框,说请插入dvd2,这时候我们需要重新开一个终端,把dvd2挂载到matlab文件夹中,输入下面的命令:
sudo mount -t auto -o loop R2016b_glnxa64_dvd2.iso Matlab2016b/
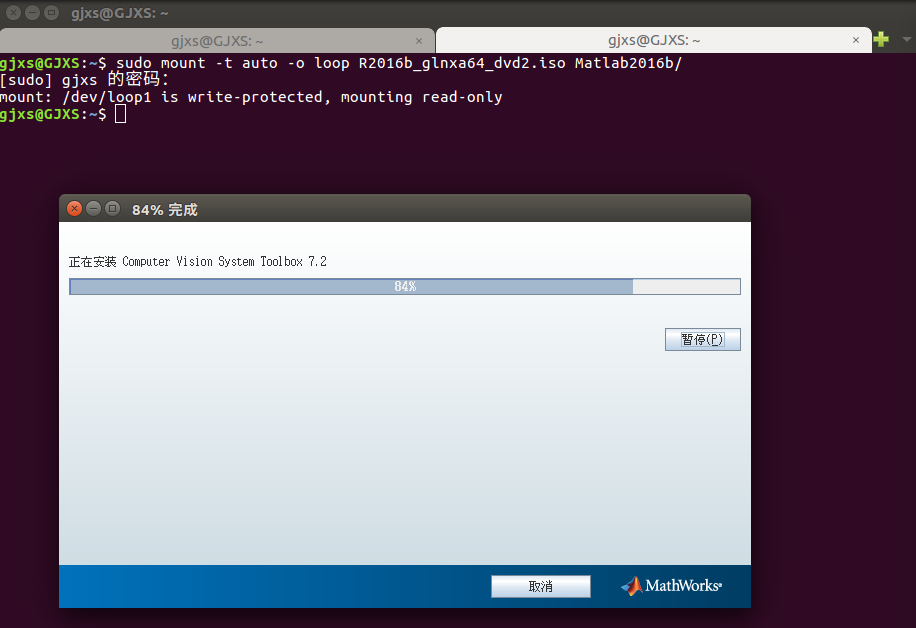
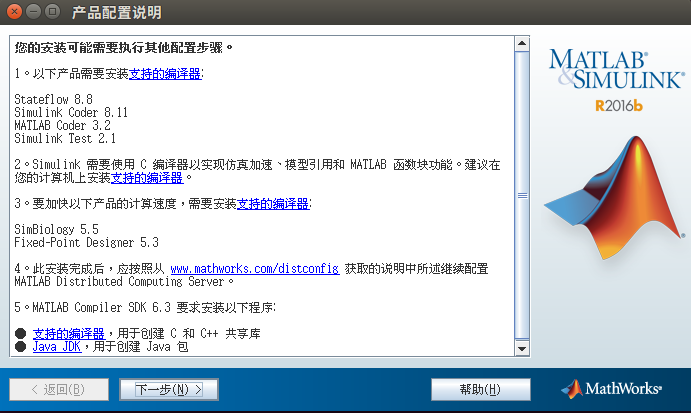

点击完成,安装的步骤就算完成了

5.破解
(1)打开安装目录下的bin文件,右键打开终端(或者直接输入cd MATLAB/bin打开终端)
然后输入:
./activate_matlab.sh
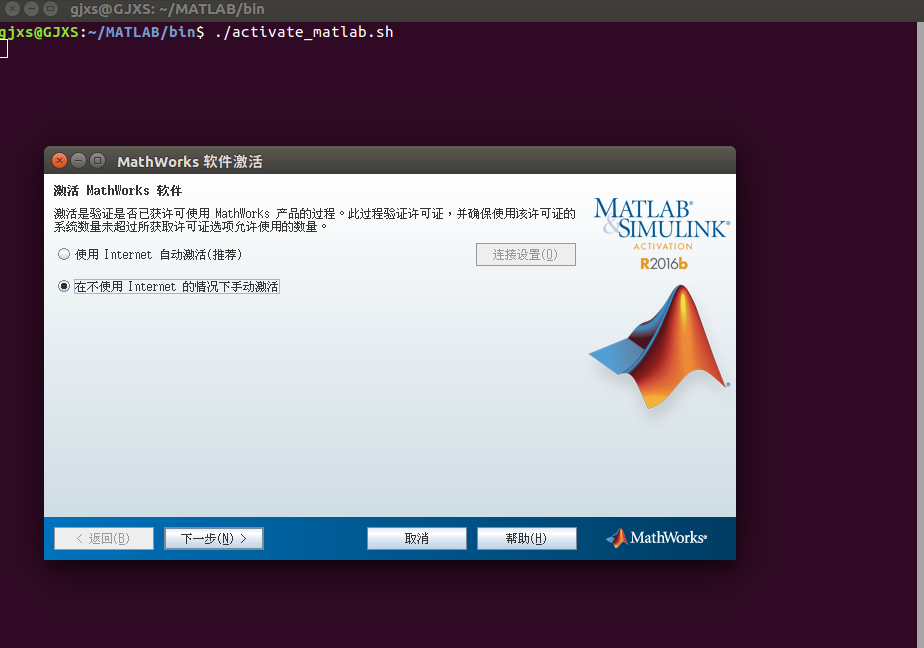
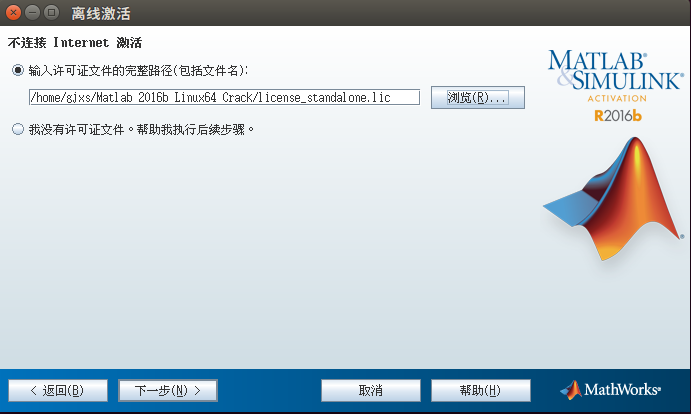
出现下面界面,选择”在不使用Internet的情况下手动激活”,点击下一步
载入激活文件license_standalone.lic:
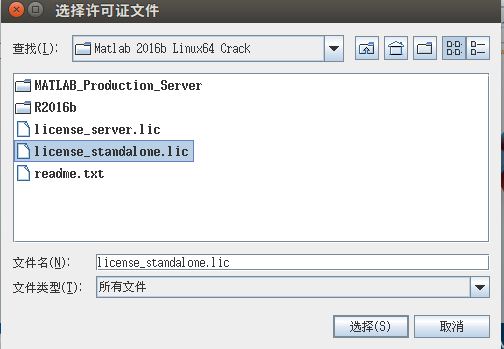
点击完成
(2)打开安装目录右键打开终端或者打开终端,输入:
cd MATLAB
输入下面命令行,把安装目录的权限都去掉:
sudo chmod 777 * -R

(3)解压Matlab 2016b Linux64 Crack.rar(如果解压失败,先到软件中心下载RAR解压软件安装),找到R2016b/bin/glnxa64/下面的四个文件
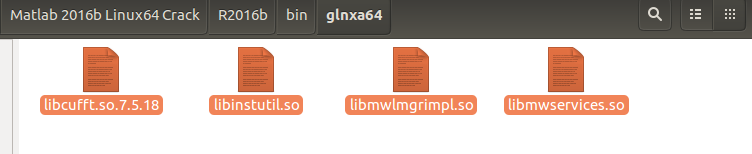 把里面四个文件复制粘贴到安装目录MATLAB/bin/glnxa64/,替换原来的文件
把里面四个文件复制粘贴到安装目录MATLAB/bin/glnxa64/,替换原来的文件 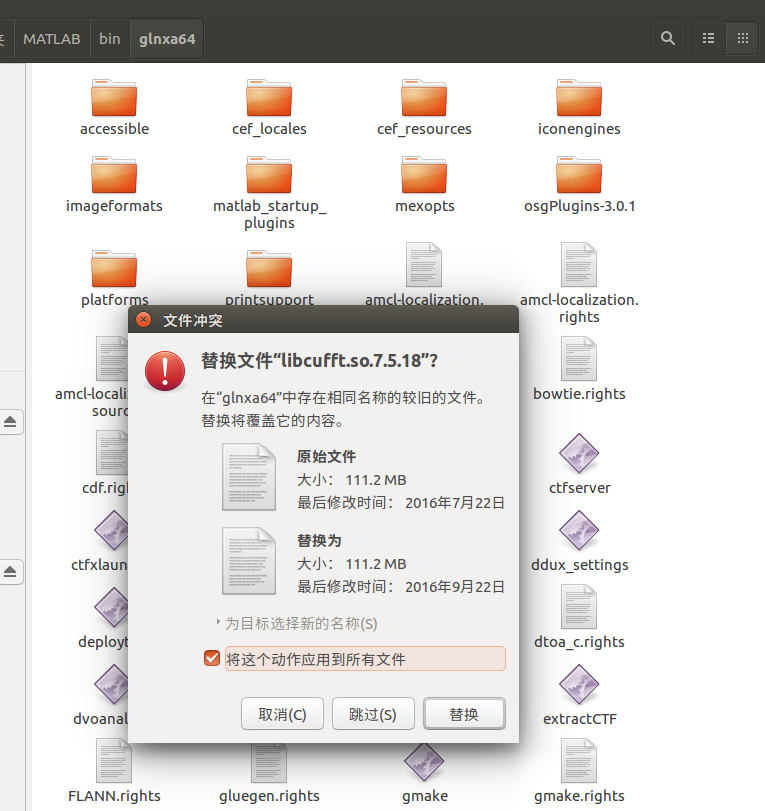
到这里,破解就算完成了。
6.打开.bashrc(在根目录ctrl+h,找到.bashrc文件,然后右键用使用gedit),在最后添加下面命令行:
export PATH=”$PATH:export PATH="$PATH:/home/gjxs/MATLAB/bin/"
保存,然后在终端运行下面命令行使设置生效:
source .bashrc
打开终端,直接输入matlab就可以运行matlab
如果你想创建一个matlab桌面启动器,操作如下:
①首先运行下面命令,创建一个启动器:
sudo gedit /usr/share/applications/Matlab.desktop
②然后把下面的代码拷进去吗,修改照片和软件的途径:
[Desktop Entry]
Type=Application
Name=Matlab
GenericName=Matlab r2016b
Comment=Matlab:The Language of Technical Computing
Exec=sh /home/gjxs/MATLAB/bin/matlab -desktop #文件matlab的路径
Icon=/home/gjxs/MATLAB/matlab.png #照片的路径(需要下载)
Terminal=false
Categories=Development;Matlab;
③保存之后,在/usr/share/applications/目录下找到软件图标,把它复制粘贴到桌面就行了
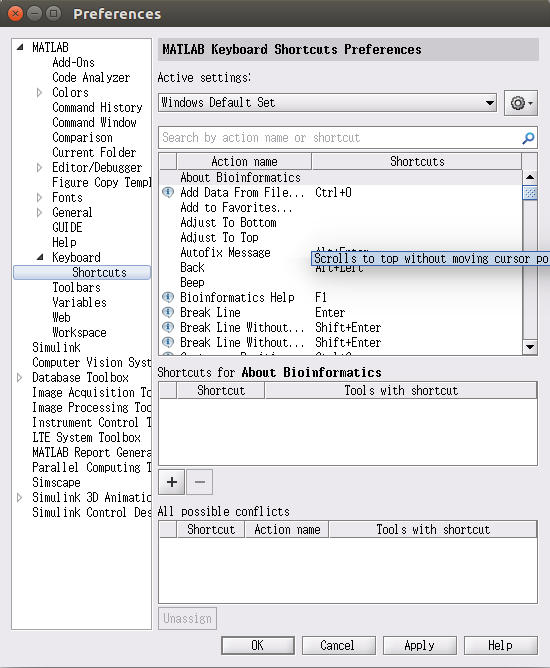
7. MATLAB的glnxa版本默认使用Emacs风格,例如使用Alt+W复制,用Ctrl+Y粘贴,如果不习惯Emacs风格的操作方式,可以修改为Windows默认方式。具体操作如下:
在菜单栏的主页标签→预设打开预设项窗口,在MATLAB→键盘→快捷方式找到活动设置,在下拉菜单中选择Windows默认集,点击确定即可。
8.打开matlab之后,我们发现默认路径不是安装目录下的bin文件

下面的操作就是修改默认路径在bin目录下:
①找到安装目录下MATLAB\toolbox\local\matlabrc.m ,用gedit打开
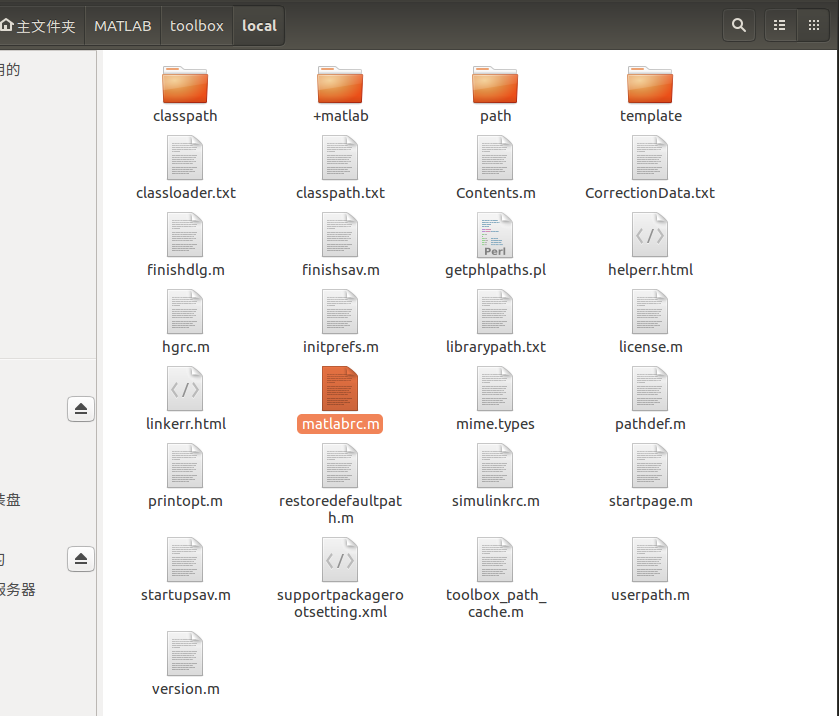
②在文件最后新增cd yourpath (你要设置的工作目录),保存即可。

③再打开就可以发现默认路径已经改回来了

9.最后一步,把挂载的文件都删了,操作如下:
①先卸载挂载的安装盘(跟U盘弹出的操作一样,右键卸载)
②打开挂载盘的文件夹,然后运行下面命令获取权限,就可以删除了
sudo chmod 777 * -R
说明:上面所有代码注意修改文件的路径,比如gjxs改为你自己系统的用户名。
评论区